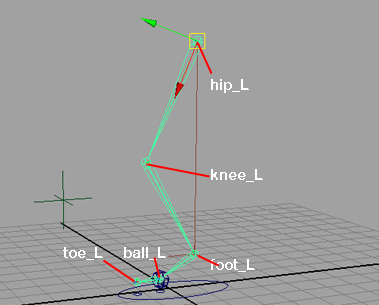
First create a leg and name the joints according to the image.You'll want to create the joints in the side view.
select the joints and modify>freeze transforms.
Use skeleton>Orient Joints when finished
Create an IK Handle using Skeleton>IKhandle from hip_L to foot_L
and name the handle foot_L_ikHandle
Create another IK Handle using Skeleton>IKhandle from foot_L to ball_L
and name the handle ball_L_ikHandle
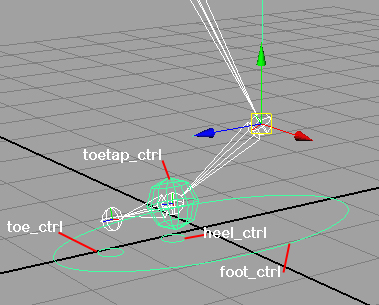

Create Nurbs Circles and spheres to use as controls.Scale,place them and name as shown in the image.When done, Freeze Transforms on the controls.Use the insert key to place all the control pivots at their corresponding joints.
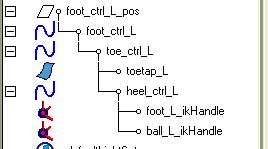

Create a group called "foot_ctrl_pos" by selecting nothing and pressing ctrl+g.
Parent all your controls under the new group by using the middle mouse button in the outliner.
Your hierarchy should appear as it does in the above image. Also parent the ball_L_ikHandle under the heel_ctrl